De opdracht
De opdracht was een grijper te ontwerpen en te bouwen die met behulp van maximaal drie actuatoren een bekertje met een massa variërend tussen de 0 en 500 gram minimaal 25 centimeter op kon tillen, om de beker hier vervolgens minstens tien seconden te houden.
Onze eisen
Om een zo goed mogelijke grijper te ontwerpen en te bouwen binnen deze opdracht hebben wij eerst een aantal eisen opgesteld waarvan wij vonden dat deze essentieel waren voor een goed ontwerp. Vervolgens hebben wij oplossingen bedacht voor alle eisen die we gesteld hadden om zo een zo effectief mogelijke grijper te krijgen.
|
|
|
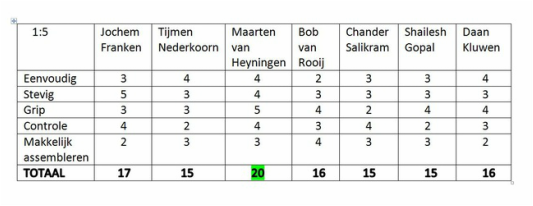
2.1. Morfologisch schema
|
Onze eerste schetsen
Voordat het definitieve ontwerp tot stand kwam heeft ieder groepslid een eigen ontwerp gemaakt met wat naar zijn idee een goede oplossing was.. Hieronder de drie schetsen die uit het morfologisch schema en na stemming het beste bleken.
|
Schets van Maarten van Heyningen
Bij dit ontwerp draaide alles om grip. De grijper is zo ontworpen dat verschillende maten van bekertjes allemaal goed worden vast geklemd. De 4 parallelle staven worden door de actuatoren naar achter getrokken terwijl de achterwand stil blijft staan. De 4 staven spannen twee elastieken op. Deze elastieken zullen dan het bekertje tegen de achterwand aan klemmen. Deze achterwand is dus afzonderlijk bevestigd aan een arm. De actuatoren zijn dan ook achter deze wand bevestigd en zorgen ervoor dat de staven ten opzichte van de wand bewegen. Dit ontwerp is ook heel eenvoudig omdat er maar twee delen zijn die ten opzichte van elkaar bewegen. Met een grote achterplaat is het ook zeer eenvoudig om aan een arm te bevestigen. Door de perfecte sterkte te vinden voor de elastieken kan een balans worden gevonden tussen vasthouden en plat drukken van de bekertjes. Dit betekent dat er een goed controle is over het bekertje. In de eerste fases van het design werd nog gedacht om een schuim laag aan te brengen op de achterwand om zo het bekertje nog meer te beschermen en dus ook meer controle te hebben over het bekertje. Dit bleek echter onnodig en daarom is dit uiteindelijk ook niet meer gebeurt. |

2.2. De schets van Maarten van Heyningen
|
|
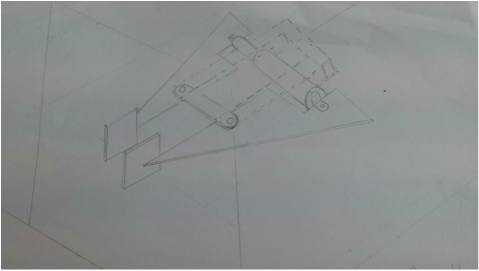
Schets van Daan Kluwen
In dit ontwerp stond de eis eenvoud vooraan. De grijper is zo gemaakt dat deze uit zo min mogelijk bewegende onderdelen bestaat. de actuator duwt de achterkant van de driehoekige vingers uit elkaar, waardoor de voorkant van de vingers door de scharnierende plaatje in het midden naar elkaar bewegen. Hierdoor hoeven alleen de vingers te bewegen (naast de actuator). De arm moet vastgemaakt worden aan het verbindende plaatje tussen de twee vingers, omdat dit onderdeel niet beweegt. Het voordeel van dit systeem is dat de kracht van de actuator aan beide kanten wordt gebruikt, waardoor er minder kracht verloren gaat. Ook is het makkelijk de kracht in deze grijper te verstellen (eis controle). Met de hefboomwerking om het scharnierende plaatje kan de kracht op het voorwerp aangepast worden door de verhoudingen van de afstanden aan te passen. Omdat deze kracht makkelijk te variëren is, kan je met de wrijvingscoëfficiënt tussen het bekertje en het materiaal van de vinger de kracht in de grijper aanpassen, zodat deze genoeg wrijvingskracht levert om het bekertje vast te houden. Echter zorgt dit ontwerp wel voor een moeilijkere assemblage omdat de arm om de rondingen van de actuator heen moet. Daarnaast is het, als de arm in elkaar gezet is, niet makkelijk om de actuator tussen de vingers te zetten zonder de arm uit elkaar te moeten halen. Een tweede probleem wat zou ontstaan bij dit ontwerp is dat de verticale krachten in de vingers gaan wrikken bij de bouten in het scharnierende plaatje wat zou kunnen leiden tot slijtage en uiteindelijk schade. Verder is dit ontwerp vrij stevig door zijn eenvoud. |
2.3. De schets van Daan Kluwen
|
|
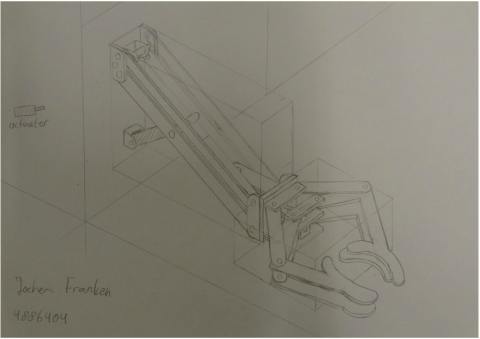
Schets van Jochem Franken
In dit ontwerp zijn de eisen op de volgende manieren meegenomen: Ten eerste eenvoud. In dit ontwerp is dit vooral terug te zien in de arm waarmee de grijper wordt opgetild. Er is hier gekozen voor twee evenwijdige vierstangenmechanismen. Dit zodat de grijper zelf altijd recht blijft staan en er dus niets uit het bekertje kan vallen. De arm wordt verder opgetild door middel van een hefboom principe. Hierdoor kan je en het bereik van de grijper vergroten en is het ook nog eens eenvoudig te maken. De kracht die de actuator dan moet leveren is dan wel aanzienlijk groter dan het gewicht van het voorwerp, maar uit het prakticum bleek dat de actuator waarschijnlijk sterk genoeg zou zijn. De grijper zelf in dit ontwerp is daarentegen wel wat minder eenvoudig door de grote hoeveelheid bewegende onderdelen. hierdoor zou het lastiger zijn alle onderdelen goed te laten passen en te laten werken. Daarnaast is er in de grijper zelf wel veel grip. Omdat er drie grijpers tot onze beschikking waren en er hier maar één nodig was voor de arm, konden er hier twee worden gebruikt in de grijper. Daarom is hier ook gekozen voor twee losse grijpers boven elkaar. Hierdoor kon er meer kracht geleverd worden op het voorwerp waardoor er een grotere weerstand zou zijn. Ook is er gekozen voor ronde klauwen. Dit zorgt voor een groter contact oppervlakte met het bekertje dat de grijper op zou gaan tillen. Om de grip nog verder te vergroten zouden de klauwen ook bedekt worden met rubber, dit heeft een grote wrijvingscoëfficiënt en dit zou leiden tot een goede grip op het bekertje. |
2.4. De schets van Jochem Franken
|
Ons uiteindelijke ontwerp
|
Voor ons uiteindelijke ontwerp hebben we besloten om te gaan voor de eenvoud en stabiliteit van de arm van Jochem en de originaliteit en effectiviteit van de grijper van Maarten. Met oog op de ontwerpwedstrijd zou onze arm de optimale arm worden om koffiebekers mee op te tillen.
Omdat er niet genoeg actuatoren voor iedere groep waren was het erg belangrijk dat deze snel en makkelijk te bevestigen waren. Op de initiële schets van Maarten stonden de actuatoren nog niet maar we waren er vrij snel uit dat deze zich op de achterkant van de grijper zouden gaan bevinden. Om de beker zo efficient mogelijk op te tillen hebben we besloten te werken met elastieken in het ontwerp van Maarten. Deze zouden zich straktrekken rond de contouren van de beker en zo een zo groot mogelijk contact oppervlak creëren tussen beker en klauw. Dit resulteerde in een voldoende wrijvingskracht om de beker op zijn plaats in de klauw te houden. De elastieken zouden echter wel de buitenkanten van de grijper naar elkaar toetrekken, wat zou leiden tot een enorme wrijving tussen de ''vingers'' van de grijper en de plaat waar deze doorheen bewegen. Om dit tegen te gaan hebben we inkepingen in de vingers gemaakt en hier een plexiglas plaatje tussen gezet. Op deze manier bleef de hoek tussen vinger en plaat 90 graden en trad er minder wrijving op. Over het materiaal waren we het vrij snel eens. Onze onderwijsinstelling, de TU Delft, gaf ons de mogelijkheid om plexiglas onderdelen te laten lasersnijden. Plexiglas staat er om bekend dat het een stevig, licht materiaal is. Bovendien is het bij verhitting te buigen. Dit zou later bij de assemblage van pas komen, op deze manier konden wij onderdelen die loodrecht op elkaar stonden aan elkaar bevestigen met bouten en een plexiglas koppelstuk in plaats van dat we deze onderdelen zouden lijmen. hierdoor worden de onderdelen steviger. Helaas hebben we de arm uiteindelijk moeten vervangen voor hout. Door een foute aanname van de lengte van de grote actuator was onze plexiglas arm niet lang genoeg. Om toch de grijper nog met actuatoren te kunnen testen hebben we de arm van hout gemaakt omdat dit op dat moment het enige materiaal was wat voor handen was. Op dit moment is de controle volledig in de handen van onze machinist Jochem. Door de druk van de actuatoren af te halen wanneer de arm zich in de laagste positie bevond en deze weer in te schakelen wanneer de drukschakelaar van de actuatoren op de klauw omgezet waren was het mogelijk de klauw in een soepele beweging open of dicht te doen. Omdat in een keer alle druk op de actuatoren werd gezet was de omhoog gaande beweging vrij schokkerig. Door de schakelaar langzaam om te halen was dit al een stuk minder en werd de beweging een stuk minder abrupt. Een massaproductie variant van onze grijper zou in de praktijk vrij makkelijk geautomatiseerd kunnen worden, helaas hadden wij hier niet de tijd en de middelen voor. Uiteindelijk heeft ons ontwerp precies gedaan wat het moest doen. De enige aanpassingen die we achteraf hebben moeten doen waren het bedenken van een goede manier om het systeem te bedienen en het vervangen van de plexiglas armen voor hout. |
|
